
Bruno Lemaire a annoncé hier la possibilité de suramortir les robots à destination des PME.
Pas mal d’entreprises seraient tentées d’en acheter directement un et de le tester. C’est, selon moi, une énorme erreur (investissement > 30k€, perte de temps minimum de 6 mois, risque social et de POC, proof of concept non transformé…), même si c’est très tentant.
Voici mon retour d’expérience sur ce sujet sur base du projet de cobots, robots collaboratifs que je mets en place avec une entreprise très connue dans la mode.
En 6 mois, nous avons déployé un robot collaboratif pour tester l’usure de produits, le robot réalise des contrôles qu’un être humain ne pourrait faire (des dizaines de milliers de gestes répétés en une journée) et nous allons mettre en place un robot qui réduira les TMS (troubles musculo-squelettiques).
Tout d'abord, j'aborde plusieurs questions (liens directs) :
- Pourquoi robotiser ? Exemple des enceintes Devialet et relocalisation des industries, filière
- Pourquoi un cobot, robot collaboratif ?
- Pourquoi ne pas acheter directement un cobot pour le tester ?
- Acceptation par les salariés du cobot
Pour y parvenir, j’ai proposé et nous avons suivi la démarche suivante (liens directs) :
- Choisir les opérations à robotiser
- Recherche de robots collaboratifs
- Choix et sélection des intégrateurs et Rôle de Livosphere, architecte
- Développement, Programmation et test du robot (risques de dérapage, UX, bugs) et rôle de Livosphere
- Installation, présentation aux salariés
- Analyse de risques et
- Suivi du projet
- Next Steps
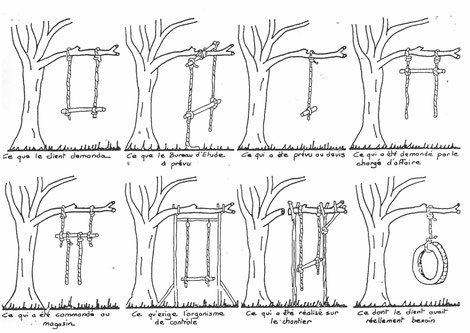
Cela peut paraître facile au début d’utiliser un robot, en réalité c’est comme construire une maison, c’est une attention de tous les instants et une coopération réussie entre l’entreprise cliente, l’intégrateur et moi. J’ai un rôle d’architecte, de la construction des plans au suivi du chantier ;)
L’expérience que j’avais acquise chez General Electric notamment en Six Sigma et en Lean m’a été aussi bien utile car l'amélioration et simplification de processus doit précéder son automatisation. Il y a aussi de nombreux gains de productivité mais c’est une conséquence et non l’objectif de ce projet. Il est essentiel aussi d'associer très rapidement les salariés au projet pour montrer que les cobots sont complémentaires et non en remplacement de salariés.
Les premiers cobots sont en place aujourd'hui et nous allons poursuivre leur déploiement dans d’autres domaines en utilisant une approche similaire.
(Pour avoir des sensibilisations, formations même à distance générales ou liées à votre secteur, vous pouvez me contacter ici : [email protected] ou ici . Nous menons aussi des projets d'Usine 4.0, robots collaboratifs, AGV...
Pourquoi robotiser ? Exemple des enceintes Devialet
Au début, il peut y avoir de nombreuses raisons incitant à utiliser des robots, augmenter la qualité, la productivité, améliorer l’environnement de travail, réduire les temps de latence, réaliser des opérations impossibles à faire par un être humain ... Enfin, les robots permettent de réduire les tâches répétitives causant notamment des troubles musculo-squelettiques (TMS) ainsi que des accidents de travail.
Ces raisons peuvent d’ailleurs inciter à relocaliser des usines en France en particulier si elles sont éloignées à quelques dizaines de milliers de kilomètres.
Devialet a ainsi implanté une usine fortement robotisée en France (cf. article), cela lui permet de se rapprocher des lieux de consommation et d’être ainsi beaucoup plus réactif face aux demandes des clients en réduisant les coûts de transport (et donc l’impact écologique), de réaliser des opérations très difficiles à réaliser ou à reproduire par des êtres humains (par exemple le collage à l’identique de pièces d’une enceinte Devialet qui a un impact majeur sur la qualité du son) et enfin de réduire les fuites de technologies.
D'autre part, le coût de la main-d’œuvre devient une part de plus en plus réduite du coût total exploitation d’une usine, en raison de l’automatisation.




Relocalisation des industries, écosystème et filière industrielle

L'Etat, les régions et les collectivités ont un rôle majeur pour faciliter le développement de ces écosystèmes (favoriser la formation aux nouveaux métiers y compris aux personnes en poste, simplification administrative, développement de partenariats publics-privés, soutien/caution financière, accès facilité aux marchés publics, développement de pôle, filière territorial...). Les actions actuelles montrent qu'ils mettent de plus en plus en place cette stratégie industrielle.
Cela favorise la relocalisation des usines (ex: SpeedFactory d'Adidas relocalisée en Allemagne) à condition bien sûr d’avoir les compétences au sein d’un bassin d’emploi et un écosystème voire une filière de sous-traitants, partenaires… proches (ex : écosystème aéronautique à Toulouse, mécanique à Clermont-Ferrand…), des infrastructures de transports et de communication (en particulier fibre) adéquats.

Juste une précision, ce serait une erreur de croire qu’il faille robotiser à 100% une usine, car l’ennemi principal du robot est la variation et sa gestion alors que l’homme sait bien mieux les gérer. C’est la raison pour laquelle Elon Musk est revenu en arrière sur les usines produisant la Model 3 qui trouvait qu’un excès de robotisation ralentissait sa production.
L’expérience que j’ai aussi acquise à travers ce projet montre que cela peut être une véritable usine à gaz si nous avions décidé de robotiser certaines tâches alors qu’à priori elles nous paraissaient simples à automatiser. L’intelligence artificielle devrait au fur et à mesure permettre de réduire la complexité de programmation et le risque de créer une usine à gaz car elle saura de plus en plus gérer cette variation mais l'être humain restera supérieur aux robots pendant encore quelques décennies.
Pourquoi un cobot, robot collaboratif ?

Notre objectif sur ce projet est que les cobots, « robots collaboratifs » s’intègrent dans le processus global de fabrication et de contrôle qualité en concertation avec les salariés. Le cobot est complémentaire et à aucun moment, il n’a vocation à remplacer des personnes.
Dès le départ, nous avons pris le parti d’opter pour des cobots et non des robots industriels. Au sens large et à la différence des robots industriels, les robots collaboratifs sont des robots qui sont simples à programmer, flexibles (ils peuvent facilement changer d’activité), évitent la mise en place d'enceintes sécurisées car le cobot est prévu pour agir à proximité d’êtres humains sans risques de les blesser.
Les coûts sont généralement nettement inférieurs (cela commence à plusieurs dizaines de k€ pour le cobot seul) néanmoins il faut ajouter les coûts de programmation, d’intégration, d’installation ainsi que l’analyse de risque et les allers-retours liés aux corrections de bugs et améliorations.
Cela implique certaines contraintes, en particulier en termes d’énergie cinétique( vitesse de déplacement * masse embarquée) des parties mobiles du robot beaucoup plus faibles (4 joules dans le cadre d’un mouvement sans recul ou 10 joules si le mouvement recule ou reste libre (ex : des portes d’ascenseur)). Toute installation de cobot nécessite aussi une analyse de risque (qui suit la Directive « Machines » 2006/42/CE) plus poussée qu’un robot industriel (qui est dans une cage !)
Pourquoi ne pas acheter directement un cobot pour le tester ?
On pourrait croire que la meilleure solution au départ est d’acheter un cobot, de le tester et de voir ce qu’on peut en faire. Même si cela paraît séduisant, c’est, selon moi, une énorme erreur, car c’est la meilleure façon de planter son projet à moins d’avoir un financement pour des projets purement démonstratifs.
Investissement important
D’abord l’investissement au départ est de quelques dizaines de milliers d’euros, tant qu’à faire, ça vaut le coup que ça serve à quelque chose plutôt que le cobot rejoigne le cimetière des POC (proof of concept) sans lendemain.
Compétences pour programmer, installer et réaliser l’analyse de risques

D’autre part, il faut programmer le robot, même si pour un développeur c’est assez simple, il faut ajouter la dimension physique. La gravitation n’est pas juste un paramètre qui se modifie comme un code javascript. Enfin il faut intégrer et réaliser une analyse de risques (réglementée).
Or ces étapes sont difficiles à réaliser pour une entreprise qui n’a pas l’habitude de programmer des robots en milieu industriel.
C’est la raison pour laquelle nous avons travaillé avec un intégrateur. Il est plus facile et parfois moins coûteux d’acheter un robot via un intégrateur qui réalisera l’intégration plutôt que d’acheter un robot directement et demander à un intégrateur de réaliser l’intégration.
Ce serait ballot de se retrouver dans une impasse avec un cobot ! Enfin, concernant l’analyse de risque, il faut être capable d’identifier tous les risques potentiels. Pour une même énergie cinétique, l’impact d’une pomme projetée contre vous sera différent s’il y a un couteau à la place. Tout le temps que vous pensiez gagner, vous le perdez très rapidement par manque de préparation et d’anticipation.
Acceptation par les salariés du cobot

L’intégration d’un robot suscite nécessairement des questions par les salariés voire des peurs très souvent injustifiées. Implanter un robot sans avoir une vision claire de qu’on veut en faire est souvent périlleux et risque de susciter une levée de boucliers.
A l’inverse, il est aussi essentiel de prévenir et d’expliquer l’arrivée d’un robot avant son installation pour éviter de les mettre devant le fait accompli (en particulier vis-à-vis de ceux qui seront directement impactés par les tâches robotisées).
Dans notre projet, nous avons communiquer sur le projet pourquoi nous souhaitions intégrer un cobot (réaliser des tests d'usure impossible à faire par un être humain) au préalable. D'autre part, de très nombreuses idées d’amélioration et de nouveaux usages sont venus des salariés car ils voient rapidement en quoi ils peuvent les aider, simplifier leur vie, améliorer la fabrication…
Etapes du projet cobot / robot collaboratif
1. Choisir les opérations à robotiser

Plutôt que de décider directement les opérations à automatiser, j’ai visité l’usine et suivi in vivo les différentes étapes de fabrication du produit avec des opérationnels, les chefs d'ateliers, le directeur d'usine et les responsables du projet de robotisation.
J’ai ensuite cartographié sous forme de processus simples (illustration différente en raison de la confidentialité des informations) ces étapes puis je les ai intégrées dans un plan haut niveau de l’usine ce qui permet de visualiser les flux de produits et de matière.
Cette étape est essentielle non seulement pour choisir les opérations à robotiser mais aussi pour se familiariser et avoir une vision globale du processus de fabrication. De plus, on ajoutait les étapes qu’on aimerait faire mais qui ne sont pas réalisées aujourd’hui (ex : tests d’usure)
Pour chaque opération, nous faisons une première évaluation (sans détails inutiles) sur
- Impact positif et négatif de robotiser celle-ci (sur le plan humain : moins de TMS, valeur ajoutée perçue par les salariés, pour l’entreprise : meilleure qualité, moins de temps perdu. les opérations qui constituent le cœur de métier de l’entreprise notamment le travail artisanal ne sont pas dans le périmètre de robotisation).
- Facilité / difficulté de la robotiser a priori (lié à la complexité de l’opération, le coup de main du salarié difficile à automatiser, l’espace pour implanter le robot…)
Les opérations à robotiser en premier sont évidemment celles qui ont le plus d'impact positif (et le moins d'impacts négatifs) et les plus faciles à mettre en oeuvre.
2. Recherche de robots collaboratifs
Il existe de nombreux robots collaboratifs et de nombreux fabricants. J’ai d’abord réalisé un panorama des différents types de robots puis sélectionné quelques-uns qui paraissent les plus adaptés par rapport aux tâches que nous souhaitions automatiser.
Il y a trois types de fabricants des robots collaboratifs :
Fabricants des robots industriels traditionnels
Les fabricants des robots industriels élargissant vers une gamme collaborative : Kuka, Fanuc, ABB sont quelques industriels connus sur ce sujet
- Avantages : leurs robots sont extrêmement robustes et éprouvés
- Inconvénients : leurs robots sont souvent compliqués à programmer par rapport aux autres et plus chers. Ils sont généralement moins flexibles car ils dérivent de robots industriels. Il est plus facile de concevoir un robot simple en partant d’une feuille blanche plutôt que de simplifier un robot compliqué !


Les nouveaux industriels spécialisés en cobots

Les nouveaux industriels spécialisés dans les robots collaboratifs, les plus connus sont Universal Robots (UR) et Rethink Robotics avec le robot Sawyer et Baxter.
- Avantages : des robots conçus dès le départ pour être collaboratifs avec une programmation et une interface facile, une grande flexibilité, des prix plus accessibles
- Inconvénients : Si vous cherchez des robots ayant des vitesses rapides ou des forces élevées, il vaut mieux voir du côté des robots industriels ou d’équipements spécifiques. Si vous cherchez des équipements dédiés et/ou à faible coût, il vaut mieux regarder des robots de startups ou des dispositifs mécaniques.
Les startups notamment françaises
Nous avons quelques startups françaises dans ce domaine MIP Robotics, IsyBot qui se développent bien.
- Avantages : des robots spécifiques qui répondent pour un coût moindre à vos problématiques. IsyBot réalise des applications métiers spécifiques (ex : le ponçage). MIP Robotics a un axe de moins. Ce qui est une très bonne stratégie car cela leur permet de proposer un produit tout-en-un rapide à mettre en œuvre.


- Inconvénients : pérennité de l’entreprise à suivre, difficulté à trouver des intégrateurs ou la nécessité de travailler avec le fabricant pour l’intégration (ce qui peut être problématique car son objectif est plus de vendre des robots que de la programmation et de l’installation), robots moins polyvalents en général
Autres points à voir
Dans le choix du cobot, en plus de la facilité d’utilisation, programmation, des coûts … il y a des éléments techniques à regarder :
- la charge et vitesse maximum, la liberté de mouvement (nombre d’axes) et la zone d’emprise du robot
- les intégrateurs capables de le programmer et installer.
3. Choix et sélection des intégrateurs

Ils ont un rôle crucial. Sur base de besoins spécifiques de l’entreprise, ils vont s’assurer de la pertinence du choix du robot sur le plan technique en fonction de l’opération à réaliser, programmer le robot, réaliser la pince préhensile, ajouter des accessoires au robot, construire des bancs de tests, créer une interface entre le robot et une tablette par exemple pour faciliter son utilisation, développer des rapports d’usage, développer une interface pour réaliser la maintenance à distance, installer et tester le robot en conditions réelles, réaliser l’analyse de risques …
L’analyse de risques est essentielle et obligatoire pour réduire tout risque d’accident et éviter tout litige si cela arrive. L’entreprise peut elle-même réaliser sa propre analyse de risque mais à moins d’avoir une flotte de robots sur lesquels on a l’habitude de le faire, c'est risqué. L’analyse de risque est certifiée par une entreprise comme Apava, Bureau Veritas, , Cetim Ineris … Cette partie est aussi directement intégrée par les intégrateurs.
Rôle de Livosphere dans le choix des cobots et intégrateurs

Livosphere a un rôle d’architecte : partir des besoins et problématiques, dessiner les plans de la solution, identifier et sélectionner les partenaires et déployer la solution avec l'entreprise cliente.
En fonction de la taille de votre projet, il peut être intéressant de faire appel à un intégrateur et à Livosphere. Si on poursuit l’image, pour construire un mur, vous n’avez ni besoin d’un architecte ni d’un maçon. Pour une petite construction, vous aurez sans doute besoin d’un maçon mais pas nécessairement d’un architecte. Au-delà de 150 m2 (seuil de surface de plancher), vous devez nécessairement faire appel à un architecte pour construire une maison. En revanche, il n’y a pas d’obligation de faire appel à Livosphere ;)
Pour choisir le robot et l’intégrateur, j’ai réalisé un cahier des charges en coordination avec le client puis une consultation auprès d’un large panel de fabricants de robots et d’intégrateurs.
Autre intérêt de passer par Livosphere, garder la confidentialité de mon client auprès d’eux, ce qui peut faciliter les discussions et négociations.
Sélection des intégrateurs

Après en avoir sélectionné trois, j’ai eu de nombreux échanges avec eux en termes de robots, support, périmètre … Ils ont alors rencontré le client, visité le site, les étapes de fabrication afin de choisir ensemble les étapes qui pouvaient être robotisées facilement.
Ce point est essentiel car vu de haut, on pourrait croire que certaines opérations sont faciles à robotiser alors que pour de multiples raisons elles ne le sont pas. Les points de vue différents entre intégrateurs sont aussi extrêmement intéressants pour avancer dans notre démarche et évaluer les intégrateurs.
Chaque intégrateur a réalisé ses devis détaillés et nous les a transmis en respectant notre deadline ou pas…
Avant de travailler avec un intégrateur, la phase de discussion, et de négociation, le respect des délais et l’exhaustivité des réponses à nos questions sont cruciaux car ils illustrent en concentré ce qui va se passer après la signature. A ce titre, il y a deux caractéristiques essentielles auxquelles je prête particulièrement attention : le professionnalisme et l’agilité.
- Professionnalisme qui se traduit par une de mes phrases fétiches « Dis ce que tu vas faire, fais ce que tu as dit, dis ce que tu as fait » à laquelle j’évite moi-même au maximum de déroger ;)
- Agilité : Capacité à faire face à des imprévus ou à saisir des opportunités
Mode de rémunération de Livosphere

Livosphere est rémunéré par l’entreprise qui va utiliser les robots et ne perçoit aucune commission de l’intégrateur ou du fabricant de robots pour des raisons évidentes d’impartialité.
Cela évite d’être mis en porte-à-faux notamment lorsqu’on doit négocier des prix avec les partenaires ou pour choisir un partenaire de manière impartiale.
Autres rôles de Livosphere : Gagner du temps et réduire les risques

De manière globale, Livosphere a pour rôle de faire gagner du temps et de réduire les risques.
Il a en plus de son rôle d’expert dans le choix des robots et intégrateurs, le rôle de suivre le projet de bout en bout et est garant de la réussite du projet. Cela évite aussi à l’entreprise d’avoir une ressource dédiée au suivi du projet.
Évidemment, cela nécessite une confiance acquise dans mon cas par un premier projet et par un premier travail d’analyse sur la démarche, les opportunités et les risques de l’utilisation de cobots (je suis un des fondateurs de Syrobo , le syndicat de la robotique il y a quelques années avec Bruno Bonnell, Bruno Maisonnier et Catherine Simon) afin de montrer que Livosphere est à même de réaliser le projet de bout en bout.
4. Développement / programmation et test
Les risques de dérapage
C’est la partie qui paraît la plus simple et pourtant qui est la plus remplie de surprises, c’est un peu comme si vous deviez monter un col à vélo, vous voyez bien le sommet et lorsque vous vous lancez, le pneu crève, car il y a des clous sur la chaussée, un véhicule manque de vous écraser, la distance est plus longue que ce que vous avez prévu …
Dans notre cas, nous avons eu quelques frayeurs car des tests qui paraissaient simples au départ, se sont révélés nettement plus compliqués à résoudre en raison notamment des contraintes d’énergie cinétique maximum et donc de vitesse du robot et de masse emportée.
Au final, nous avions prévu deux tests avec un robot, nous avons su en faire trois. Un des deux tests semblait trop difficile à réaliser alors on a réfléchi à un plan B… et grâce à une coopération à trois et une forte inventivité de l’intégrateur (qui a su mobiliser ses équipes), nous avons obtenu les trois tests !
Il est évident que le fait d’avoir instauré un climat de confiance, de partenariat entre nous trois a donné envie à l’intégrateur de relever ces défis.
La partie développement et test doit être suivie de près car c’est à ce moment-là que tout peut déraper.
Le développement des programmes et interfaces

Après une partie en vase clos de développement par l’intégrateur viennent les premières vidéos des tests du robot.
Durant la phase de développement, des petites piqûres de rappel sont importantes pour s’assurer que tout se passe normalement, que le planning ne sera pas décalé, qu’il n’y a pas de gros bug ou de fonctionnalités qui ne seront pas délivrées.
Souvent, le client final n’a pas le temps de s’occuper de cela, et c’est une partie de ma valeur ajoutée : s’assurer à tout moment que « Everything is on track as we expected » et s’il y a un souci, trouver des solutions. Le risque sinon est l’effet tunnel, avec un intégrateur qui prend plus de temps, ou en perd en oartant dans une mauvaise direction.
Il y a un certain stress avant de voir les vidéos car c’est la première fois que se matérialise tout ce que l’on a conçu avant. Dans notre cas, nous avons été très agréablement surpris par les premières vidéos où le cobot a réalisé des tests. Mais après la première phase d’enthousiasme, où l’on voit que le cobot répond à plus de 90% de ce que nous voulons, on commence rapidement à décortiquer les vidéos et à vouloir approcher le plus possible du 100% !
Les corrections et modifications

Les ajustements et modifications sont très nombreux au début, les échanges permanents, avec des conférences calls hebdomadaires. Cette période est un moment test car obligatoirement il y a des différences entre les attentes très élevées de la part du client et la première version de tests du robot.
Dans notre cas, la personne en charge de la qualité nous a indiqué qu’il y avait des tests que nous faisions avec le robot qui étaient normés et qu’en conséquence, il fallait que le robot reproduise au plus près ces mêmes tests. C’est un point que nous n’avions pas anticipé au départ qui nous a créé deux, trois nœuds au cerveau car les tests normés utilisaient des robots industriels en cage qui avaient des vitesses et des charges maximales bien supérieures à ce qui est autorisé pour les robots collaboratifs.
Nous avons fait quelques allers-retours avec nos cours de lycée sur la chute des corps et la trigonométrie car l’énergie cinétique est dépendante de la masse et de la vitesse. La vitesse est-elle décomposée en une vitesse horizontale et verticale qui se mesure en multipliant la vitesse initiale avec respectivement le cosinus et le sinus de l’angle de la trajectoire avec le sol ;) En jouant avec la gravité (9,8m/s2 ! ), de l’ingéniosité et la persévérance, nous avons réussi à trouver la solution !
Rôle de Livosphere durant le développement, les tests

Durant cette étape, mon rôle est multiple,
- Trouver et anticiper le plus tôt possible les divergences entre ce qui est attendu et ce qui sera délivré tout en respectant le planning
- Trouver des solutions alternatives avec l’aide du client et de l’intégrateur, prioriser et déprioriser pour tenir le planning (et/ou le décaler de manière acceptable si nécessaire) et le budget en cas d’obstacle majeur
- S’assurer à tout moment d’une communication fluide, sans non-dits ou loups entre le client et l’intégrateur
- Maintenir une pression saine auprès de l’intégrateur tout en explicitant à l’avance au client l’impact de ses éventuelles exigences trop élevées en termes de coût ou de délai.
- Etre un acteur neutre et légitime pour faciliter la prise de décisions
- …
5. Installation du cobot
Présentation aux salariés
L’installation d’un robot sur un site industriel est critique car il doit donner une première bonne impression directement aux salariés.
Cela signifie que son usage est clair et qu’il ne laisse aucune interprétation sur le fait qu’il n’a aucune vocation à remplacer qui que ce soit, il doit fonctionner correctement et être facile à utiliser.
Enfin, il doit y avoir un effet Waoouh, sinon les salariés se disent « Tout ça pour ça !». Avant l’installation, nous nous sommes déplacés sur le site de l’intégrateur pour voir le robot en action sur place. Nous avons bien fait car il restait encore des ajustements à faire avant sa mise en place.
Le jour J, nous avons mis en place le robot avec l’intégrateur. Comme je l’avais dit précédemment nous avons eu trois tests d’usure opérationnels au lieu des deux prévus initialement grâce à la persévérance et l’ingéniosité de l’intégrateur. La phase d’installation a été suivie par une phase de formation sur les fonctionnalités mais aussi sur les consignes de sécurité.
Durant l’été, le cobot a été déplacé dans un autre lieu où tous les principaux tests qualité sont concentrés.
6. Analyse de risques

L’analyse de risques est obligatoire à chaque nouvelle application faite par le robot, en revanche les applications très similaires peuvent reprendre une partie de l’analyse déjà menée. L’objectif est de s’assurer qu’il n’y a aucun risque pour le personnel. Cela va du marquage au sol de la zone d’emprise, de bouton d’arrêts d’urgence, analyse des trajectoires du robot pour vérifier qu’il n’y a pas de risque et formation des personnes qui manipulent le robot.
Elle peut sembler parfois fastidieuse mais elle évite que des accidents du travail se produisent et dans le cas où ils se produisent, d’être couvert par l’assurance.
La certification de l’analyse de risque est généralement réalisée par un organisme externe qui peut être l’intégrateur mais il est possible de le faire soi-même. En revanche, je conseille au début de le faire par l’intégrateur ou si vous avez acheté directement votre robot par un organisme de certification.
7. Suivi de projet

Comme pour chaque projet, il y a à la fois des bugs à résoudre et des évolutions, nous avons mis en place une remontée à deux niveaux, une première remontée des utilisateurs vers deux personnes spécifiques et formées à l’utilisation du cobot.
Ils réalisent les remontées après la qualification et priorisation vers l’intégrateur. Celui-ci a une interface où l’on peut suivre la résolution des bugs et le développement des évolutions.
Des conference call régulières permettent de garder le momentum de part et d’autre et de faire évoluer les solutions.
8. Next Steps
En parallèle, nous avons commencé avec l’intégrateur d’autres opérations qui permettent de réduire les TMS (troubles musculo-squelettiques). Un nouveau robot devrait arriver dans les prochains mois.
La suite pour Livosphere

Dans mon cas, mon objectif n’est pas de rester éternellement sur ce projet mais que l’entreprise et l’intégrateur travaillent de plus en plus directement sans mon intermédiaire. Ainsi, créer une coopération puis une confiance entre deux entreprises, c’est ce qui m’a animé et me permet aujourd’hui de réduire mon rôle au fur et à mesure du temps pour commencer de nouveaux chantiers :)
J’espère que cet article vous a permis de mieux voir comment mettre en place des robots collaboratifs dans une entreprise. Je l'applique aussi sur tous mes projets de recherche et de déploiement d'innovations en l'adaptant. L'intérêt pour l'entreprise est de réduire au maximum les mauvaises surprises pour n'en avoir que des bonnes. L'objectif aussi de cette démarche est d'avoir un impact sur le long terme tout en ayant des bénéfices à court terme car elle est bâtie dès le départ sur les problématiques de l'entreprise.
Si vous avez des projets de cobots, mais aussi tout projet où vous recherchez des solutions innovantes avec des partenaires (IA,IoT, Blockchain, VR/AR…), n’hésitez pas à m’en faire part. Je serai ravi de vous aider. :)
Dimitri Carbonnelle
Agence conseil en Innovation - IoT, IA , Robots Collaboratifs - Contact





